
そのクルマは片側対面通行のかなり入り組んだ一般公道を滑らかに駆け抜けた。途中、登りや下り、コーナーもあったが、滑らかに計算づくされたかの様に最低限の加減速を繰り返して走った。曲がり道の中、常に(左側通行だったので)左前のタイヤの軌跡が丁寧に道の端を捉え、綺麗な円弧を描き続けた。道幅が広がれば外側に振れ、狭まれば内側に向かった。速度計は時速60キロ前後で揺れていた。30分程度だと思うが、その間、危なさは全く感じなかった。緊急時に備えて、人間ドライバーが運転席に座っていたが、特に彼は何もする必要がなかった。センサーとアルゴリズムが演じるそのクルマの走りは、まさに、プロ並みに磨き上げられた水準だった。
***
第3回目、今回のアジェンダは“A: Autonomous”です。自動運転の実用に向けては「自動運転技術」のみならず、国・政府や国際間を含む「制度や規制」、実用化に向けた「社会受容性」、という課題が、かなり入り組んだ形で絡み合って居ます。よって、これらを2回に分けて説明したく、前半となる今回は、「自動運転の始まり」と「自動運転: 技術編」について説明します。
***
自動運転の始まり
前回「コネクティッド」にて触れた通り、「自動運転」というアイデアは第二次世界大戦前から話題としてあり、また、戦後には、道路からクルマに信号を送り制御する方法で実用化に向けた開発も行われた。GMやRCAによるそれら試みは今日の「インフラ協調」の源流とも言えるが、兎にも角にも、それは成功しなかった。当時、自動運転を開発の上で、「コンピュータが大きすぎてクルマに乗らなかったこと」が制約要因の一つだった。
しかし、状況は徐々に変化した。背景にあったのは「ムーアの法則」だ。Intelの現名誉会長Dr. Gordon Mooreが1965年に「CPUの単位あたり計算能力は1.5年で倍増する」と唱えた。法則に従えば、CPUの進化が始まった当初は、その処理能力は66年半ばには2倍、68年には4倍、になったと考えられる。当初、この進化スピードは大したものでは無いように見えるが、時が経つほど、進化は加速度的に増える。つまり、例えば30年後の1995年であれば、「2の20乗=1048576」倍となり可成の絶対値だ。
丁度、その頃、欧州にて自動運転の開発が新たな時代を迎えようとしていた。1987年から1995年の間、欧州委員会は当時10億ドルの巨費を投じ“EURECA PROMETHEUS”という自動運転開発プロジェクトを推進した。同計画の下、開発された自動運転の試作車(Mercedes Sクラスベース)が1995年に、ミュンヘンとコペンハーゲンのアウトバーン往復1000マイルを平均時速175キロで走破した。その間、人間が介入したのは僅か9キロ、残りは全て車内に据え付けられたコンピュータがクルマを制御した。こうして今日の主流である「自律型」の自動運転が初めて開発された。
その後、間もない2000年、米国で大きな動きがあった。連邦議会が「2015年迄に戦争の前線に投じられる車両の1/3を自動運転とする」ことを決議したのだ。これを受け、DARPA(国防高等研究計画局)が2004年より「DARPAグランドチャレンジ」というロボットカーによるレースを開始した。100万ドルの賞金をめぐり、多くの大学や企業、研究機関がこのレースに参加した。結果、上位に入賞を果たしたエンジニア達がその後の米国での自動運転開発をリードする様になった。
そして遂に2012年5月にGoogleが初めて、Nevada州にて自動運転の公道での実証実験を開始した。クルマの屋根に取り付けられた大きな筒状のLiDARを搭載したPriusの写真を思い出す読者も多い筈だ。正直、筆者も当時はじめて、自動運転が現実のこととして認識するようになった。この自動運転Priusを開発した当時Googleのドイツ人エンジニアSebastian Thrunは2005年DARPAグランドチャレンジの優勝者(Stanford大学)である。以来、自動運転の実用化を目指し熾烈な競争が展開され、各国政府自らが手綱を握りつつ、自動車OEM、サプライヤー、スタートアップ、大学研究機関等々のプレイヤーが日々しのぎを削っている。
自動運転:技術編
自動運転のレベル規定詳細に関しては、国土交通省が昨年9月に発表した「自動運転車の安全ガイドライン」等を適宜ご参照願いたい。ここでは、“ODD”というイケてる概念を中心に、自動運転に関する技術的なことのいくつかに関して、説明をしたい。
ODD(Operational Design Domain)は、「自動運転システムが正常に作動する前提となる設計上の走行環境に係る特有の条件」と定義づけられており、道路・地理・天候・昼夜・速度等の条件を指す。あれこれと条件設定が多ければ、自動運転の実現はし易くなり、逆に、条件付けが少ないほど、難しくなる。つまり、自動運転の技術については、「レベル」のみで一概に整理するのではなく、「ODD」と組み合わせたマトリックスで考えることが必要だ。
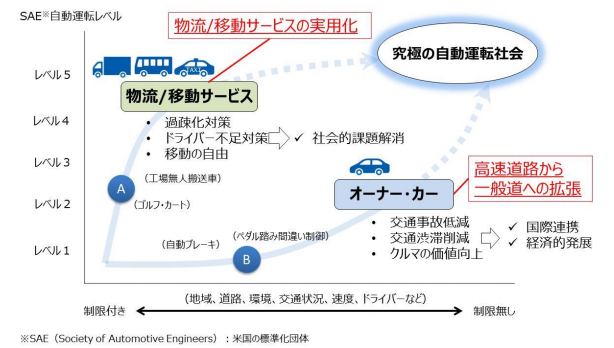
その様な条件は、例えば鉄道が線路の上のみを走ることを前提としている様に移動サービス用のクルマであれば、比較的に容易く設定できる。しかし、一方で、個人所有のためのクルマでは、機能の成立条件が多い程、その機能の商品価値は少なくなる。つまり、自動運転は、「物流・移動サービス用車両」と「オーナーカー」という2つのセグメントで異なる経路に沿って進化することになる(内閣府SIP(戦略的イノベーション創造プログラム)自動走行システム資料(9ページ)から引用した下図を参照)。
Audiは現行A8モデルに、トラフィックジャム・パイロットとして「時速60km以下での高速道路等での走行時に可能なレベル3自動運転機能」を導入している(注; 後述するが、規制上の問題から、未だ実用化されていないが)。つまり、ここで言う「時速60km以下、高速道路」という条件がレベル3走行のためのODDであるが、では、なぜ、斯様な条件設定をする必要があるのか。一つの理由はセンサーにあると言われる。
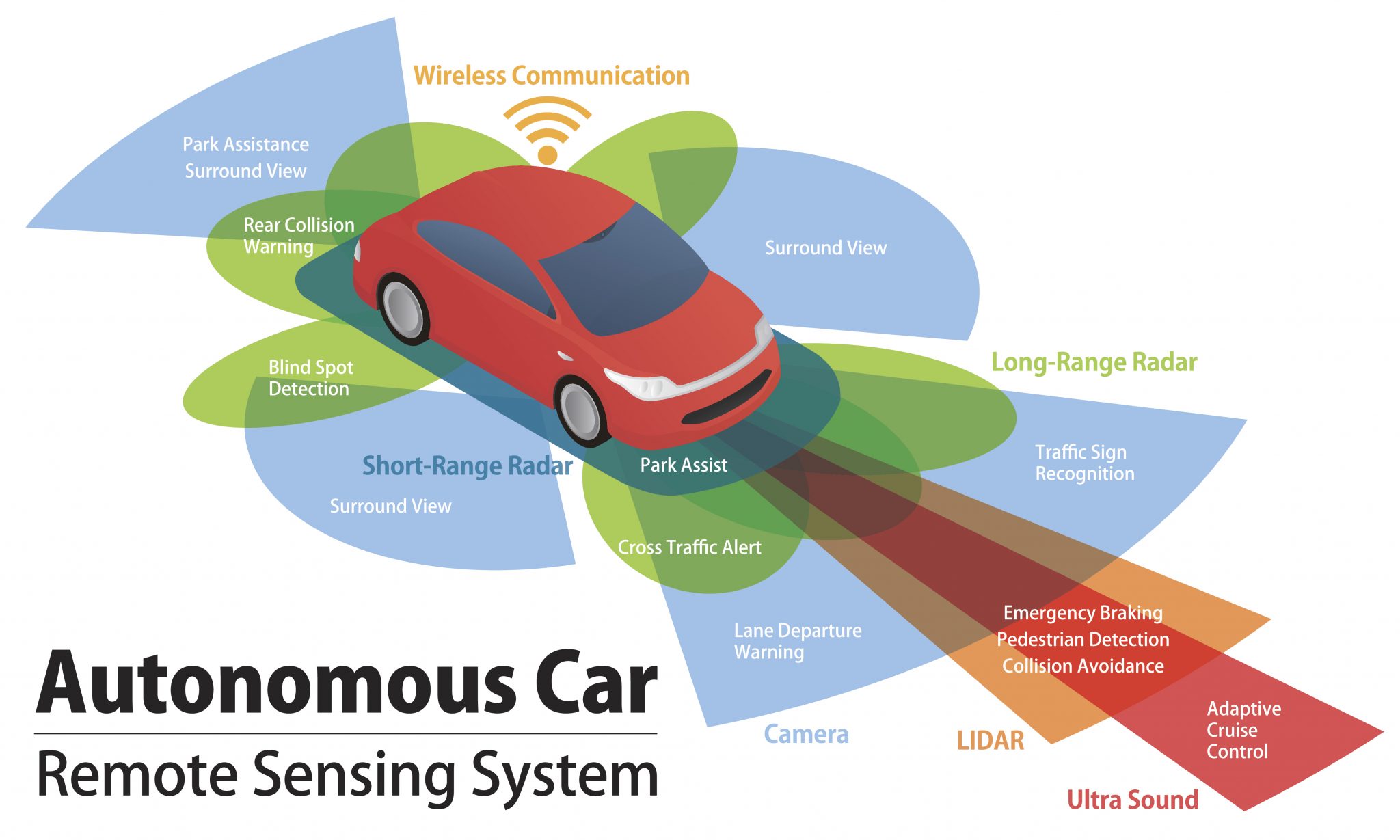
自動運転は、「認知」「判断」「操作」という3段階の要素から構成される。うち、「 認知」とはセンサー技術を意味し、3要素の礎となる技術とも言える。つまり、認知無しには後の2つは成り立たないので。但し、どこまで認知できるかは、センサー技術次第だ。今ですら、クルマには色々なセンサーが搭載されているが、それらは、センシングの範囲毎に役割分担されている。結果、センサーには、カメラ、LiDAR(レーザースキャナー)、ミリ波レーダー、音波検知(ソナー)等、様々なものがあるが、中でも前方長距離の視界確保には、LiDARが用いられている。
レベル3自動運転の場合、「(自動運転システムの)作動継続が困難な場合」には、運転操作の主体はシステムから人間ドライバーにトランスファーされる。この主体移管、つまり、トランジションとか、オーバーライド、とか、テイクオーバー、とか言われるがそのための時間は、6秒程度(+α)と言われる。つまり、自動運転システムは、6秒先に起こるであろうことを予め察知してドライバーへのオーバーライドを判断することになるが、その為には、走行中の前方環境がどうなっているか、認識することが必要だ。時速60kmのクルマは6秒間で100m進むので、100m先前方の状況が認知されていなければならない(因みに、この認知とは、単に「物体がある」だけではなく、それが人なのか、タイヤなのか、見分けられる画像認識が伴い、その為にAIも用いられている)。つまり、「100m先まで」の認知能力の結果、「時速60km以下=トラフィックジャム」というODDが設定された。したがって、仮に、速度が時速120kmでも、レベル3の機能を発揮させ、例えばメールを読む等、運転以外の行為をしたいとなれば、200m先まで認知できるセンサーが必要となる。しかしながら、現在のセンシング技術では、LiDARが検知できる限界は200mと言われ、オーナーカーに搭載するには適さない。何故なら、最先端の性能が発揮できるLiDARは、とても大きく、価格も大変高いため、そんな外観を持った高価なクルマを、自分の懐を痛めて買おうという人数は相当限られるからだ。仮に、将来的に、LiDARの小型化・安価化が進む、乃至はより実用的な長距離認知技術が実用化されれば、ODDはより広がる。こうして、ODDは(コストも含めた)技術的要件を考慮の上設定される。
因みに、以上のケースでは、「予め察知可能な」予知範囲を6秒に限定して説明したが、ODDを広げる為には、予知範囲を広げ、より先読みができるようにする選択肢もある。また、先読みに関しては、レベル3に限らず、レベル4等にも共通した課題だ。まず、認知に関わる色々なセンサーから取り込まれたデータが組み合わされて一つの「事態認識」が行われる(センサー・フュージョン)。ここでもAIが用いられ、AIには、色々な状況からのセンサーデータが取り込まれ、機械学習が行われる。また、データはリアルなデータに加え、バーチャルなシミュレーションも含めることで、ありとあらゆる状況が再現される。つまり、高度なコンピューティング技術と、大型化したコンピュータが必要となり、置き場と、コストと、稼動させる電力エネルギー、それぞれをどうするのか、という課題が発生する。
加えて、システムを安定的に作動させるために、「冗長性の確保」という課題もある。冗長性とは、元々はITの用語とのことだが、「システムの一部に何らかの障害が発生した場合に備えて障害発生後でもシステム全体の機能を維持し続けられる様に予備システムを平常時からバックアップとして配置して運用しておくこと」を意味する。つまり、バックアップ・システムのことも必ず考慮に入れなければならない。
また、レベル3については、「(例)6秒の猶予」の結果、人間ドライバーが何とも危機的状況をマネジすることができず、事故が発生してしまったらどうなるだろうか? ルール上は、人間ドライバーの責任となるが、今度は、「果たしてそんな危険なシステムを買う人間が居るか?」ということになる。結果、レベル3の商品化にあたっては、最悪の事態でも、運転手や搭乗者の安全が確保する “Minimum Risk Maneuver” の装備が必要となる。
以上、諸々の要素の掛け合わせの結果、ODDが設定され、その設定要件の中で、実用可能な自動運転システムが開発されている。例えば、レベル4について言えば、概ね、2020年代半ばには実現が予想されている。アルファベットは既にフェニックスでレベル4の移動サービスを開始、中国・百度も今年年内、GM、Ford、FCA等は2021年、ダイムラーは2020年代前半、日産は2022年まで、トヨタは2026年まで、と夫々、運用開始に向けた計画を発表しているが、ここにおいても、「レベル4」ということのみならず、その前提となる「ODDの設定内容」が大きな意味を持つのだ。
《続く》









